{kind=link}

Development of surveying
Once upon of time, the measurement method was limited by using indium steel rulers. As the time goes on, and the social development, the optical instruments were started to widely use to field surveying, such as theodolite, auto levels. Even the laser and infrared instruments, as well as the instruments which integrates with multiple technologies, like total station are applied to field surveying in succession. However, those progresses and developments are for the purpose of improving productivity. Yet those methods are limited by many factors, such as the limitation of observation environmental conditions, climate, and ensures the viewing between observation points, and requires deploy a large number of control points and ground stations in advanced.

With the liberalization of the GPS system’s civil authority, GPS measurement technology has developed rapidly. In addition, GLONASS, BDS and GALILEO systems have been put into use one after another, they also can provide stable and reliable positioning information for GNSS measurement, so GNSS measurement can achieve all-weather observations, and doesn’t require the viewing between observation points, which greatly improves the efficiency of measurement work.

Definitely, people are still working tirelessly on the road to improve work efficiency. Many convenient functions have been added to GNSS measurement equipment, such as tilt measurement. The tilt measurement technology has also undergone the development of the first and second generations. At present, tilt measurement technology has developed to a new height, a new generation of tilt measurement which combines GNSS positioning with IMU(Inertial Measurement Unit) auxiliary measurement. In a word, while the RTK incorporating inertial navigation technology comes out, it can be said that this technology brings a great convenience to GNSS measurement.
Why IMU auxiliary is so popular?
First of all, let’s take a look at the first generation of tilt measurement technology, it is a technology based on the three-dimensional attitude. It mainly need to calibrate the accelerometer and magnetic sensor in the receiver, and then obtains the tilt information by acquiring the attitude information output by the sensor. This technology is greatly affected by changes of the magnetic field, at the meantime, the accuracy of the magnetic declination angle output from sensor is relatively low, and the previous operations are more complicated as well.

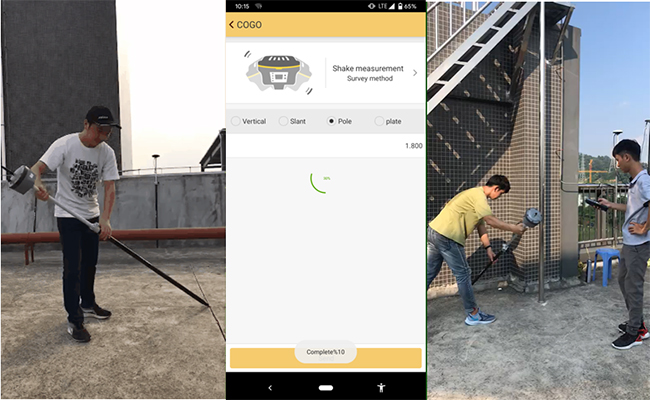
The second generation of tilt measurement—Shake measurement, is a tilt measurement technology based on the core algorithm. Adopting the combined processing model of highly dynamic RTK data and highly dynamic MEMS inertial data, the receiver can calculate the Yaw without using magnetic sensors, fundamentally resolves measurement errors due to ambient magnetic interference and artificial jitter, therefore, it free to the calibration of magnetic field. However, due to the slow output and unstable accuracy, it has not been widely used.
The third generation of tilt measurement technology, which is currently the most popular IMU auxiliary tilt measurement technology. The basic principle of this technology is to calculate the Yaw through the angular velocity output from the onboard gyroscope, combines with the position and velocity information output from the GNSS motherboard, and then integrate the Roll and Pitch output by the accelerometer to calculate the coordinate compensation.

Because the Yaw information is not output from the magnetic sensor, instead of calculating in combination, so the magnetic sensor is not used in the IMU module, in other words, the IMU auxiliary tilt measurement is not affected by magnetic fields, so people don’t need to worry about the interference for accuracy by magnetic field environment (high voltage lines, large metal structures). Compare to the first generation of tilt measurement, calibration-free of magnetic sensor can be implemented on the IMU-based RTK.

Besides, the operation of initializing the IMU module is very simple that only need to shake the instrument back and forth on the carbon fiber pole a few times while there is a voice from instrument saying ”tilt survey is available”, this moment, the initialization of IMU module is completed, the entire process only takes around 5-8 seconds. If tilt survey is not available during the measurement (stay still for a long time or lose fixed solution at a time), the method of re-activate IMU module is to shake the instrument again, or keep the instrument moving a few meters away, the IMU module is reawakened, extremely simple and fast operation.

After the IMU module initialization is completed, tilt survey function is ready to measure points without strictly keeping the instrument level, collect point coordinates while pole tip reaches, collected then leave to next points, because the stability of the IMU guarantees the reliability of the coordinate accuracy.



Because of the advantage of IMU fast collects point only if pole tip reaches, it brings convenience in some tough measurement environments, such as the point where surveyor is difficult to reach or can’t stand at directly, the point is covered or locates at a dangerous place, as well as some points where the carbon pole can’t strictly centered if use the conventional instrument.
